
目录

在电影奇异博士里面,空间可以根据能量被无限扭转,以至于在电影院里面看的时候容易晕头转向。这是我们大脑的局限性决定的,但为了描述更复杂的数学问题,数学家往往需要进行高维度的抽象和计算,这也是为什么大学里面的数学开始令人感觉困难的原因。
一、矩阵的意义
在上一篇文章矩阵的计算与应用中,我们了解了矩阵的基本特性和使用场景,但对许多人来说,对矩阵的认识仍然还停留在二维数组上面,而实际上矩阵的几何变换,才是理解线性代数的精髓。
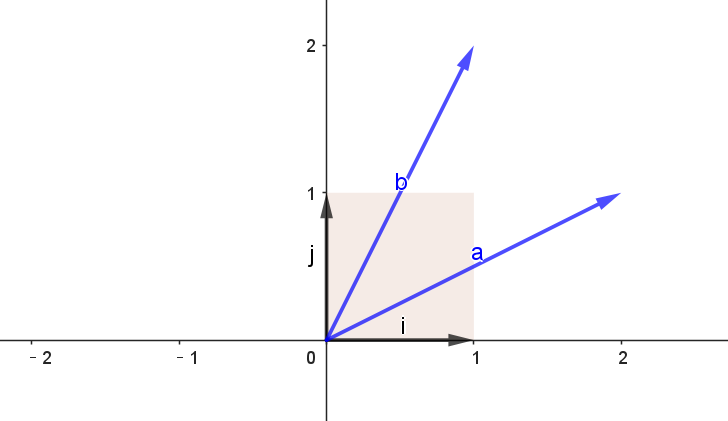
我们先想象你面前有一张无限大的、由完美正方形网格组成的纸。在这个网格上,有两个特殊的向量:一个沿着水平方向的 i 向量 [1,0],和一个沿着垂直方向的 j 向量 [0,1]。这两个向量构成了我们空间的“基石”,它们围成了一个面积为 1×1=1 的单位正方形,如下图:

向量a[1,0] 和向量 b[0,1],正好构成了一个2*2的单位矩阵 I:
接下来,我们尝试在这个平面坐标系中绘制两个从原点出发的向量。
向量a[2, 1] 和向量 b[1,2],正好构成了一个2*2的矩阵 A:
具象的说,一个矩阵可以被看作是一系列指令,它告诉你如何拉伸、旋转、压缩原始坐标网格。
以上面的网格为例,我们假设水平方向的 i 向量 [1,0]经过旋转拉伸变换到了 a[2, 1] ,而垂直方向的 j 向量 [0,1] 经过旋转拉伸变换到了 b[1,2 ],那么随之而来的,就是整个坐标网格都发生了相同方向和倍数的线性变换,如下所示:
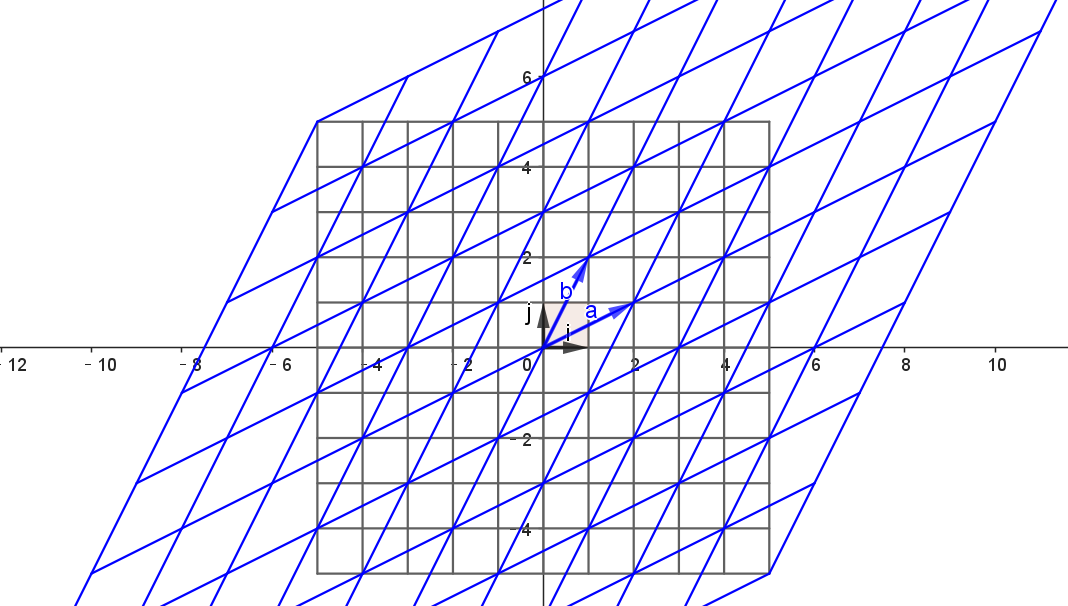
构成矩阵的向量可以告诉我们基石向量 i 和 j 在变换后会移动到哪里,根据线性变换的特点进一步推断出整个空间的形状会如何进行变化。那么如果一个矩阵是 3×3 的,它所代表的线性变换作用于三维空间,矩阵的分向量就代表了对这个三维空间进行变换的一系列指令,这样的变化可以实现三维拉伸或压缩物体的效果,比如把一个球体变成一个椭球体等等。
由此可见,而且无论是平面二维、立体三维或是更高维的计算,都可以借鉴这样的计算方式。
接下来,介绍两个线性变换中的基础概念:
- 矩阵的行列式:行列式是一个标量值,它描述了坐标网格在变换过程中的缩放因子。通过计算行列式我们可以知道,在经过矩阵向量变换后,图形的面积或体积被缩放了多少倍。
- 矩阵的逆:我们已知基向量方阵按矩阵向量的方向进行变换(乘积)后可以实现空间变换效果,那么怎么撤销这个变换效果呢?矩阵的逆是一个反向变换的矩阵,通过将矩阵和它的逆矩阵进行乘积运算,可以恢复到基石向量方阵,也就是原来的样子。
二、矩阵的行列式
矩阵行列式,用于描述方块矩阵在线性变换时,关于“体积”的影响因子,或者说是将一个单位“体积”(如单位正方形或单位立方体)进行线性变换后,其体积发生变化的比例。
行列式的计算公式取决于矩阵的大小。
二阶行列式
对于一个二阶矩阵:
\[A = \begin{pmatrix} a & b \\ c & d \end{pmatrix} \]
其行列式记为 \(|A|\) 或 \(\det(A)\),计算公式为: $ |A| = ad – bc $
例如:
计算矩阵 \(A = \begin{pmatrix} 3 & 5 \\ 1 & 4 \end{pmatrix}\) 的行列式。
根据二阶矩阵的公式:
\[ |A| = (3 \times 4) – (5 \times 1) = 12 – 5 = 7 \]
三阶行列式
对于一个三阶矩阵:
\[A = \begin{pmatrix} a_{11} & a_{12} & a_{13} \\ a_{21} & a_{22} & a_{23} \\ a_{31} & a_{32} & a_{33} \end{pmatrix} \]
其行列式可以使用对角线法则(也称为萨吕斯法则)计算:
\[ |A| = a_{11}a_{22}a_{33} + a_{12}a_{23}a_{31} + a_{13}a_{21}a_{32} – a_{13}a_{22}a_{31} – a_{11}a_{23}a_{32} – a_{12}a_{21}a_{33} \]
例如:
计算矩阵 \(B = \begin{pmatrix} 1 & 2 & 3 \\ 0 & 1 & 4 \\ 2 & 0 & 5 \end{pmatrix}\) 的行列式。
使用对角线法则:
\[|B| = (1 \times 1 \times 5) + (2 \times 4 \times 2) + (3 \times 0 \times 0) – (3 \times 1 \times 2) – (1 \times 4 \times 0) – (2 \times 0 \times 5) \]
结果:
\[|B| = 5 + 16 + 0 – 6 – 0 – 0 = 15 \]
N阶行列式
对于大于三阶的方块矩阵,通常使用拉普拉斯展开定理(Laplace Expansion)来计算行列式。
该定理允许我们将一个 n 阶行列式展开为若干个 (n-1) 阶行列式(称为余子式)的线性组合。
我们可以沿着任意一行或任意一列进行展开。以沿着第一行为例,n 阶矩阵 A 的行列式可以表示为:
\[|A| = \sum_{j=1}^{n} (-1)^{1+j} a_{1j} M_{1j} \]
其中:
-
\(a_{1j}\) 是第一行第 j 列的元素。
-
\(M_{1j}\) 是 \(a_{1j}\) 的余子式,即去掉矩阵 \(A\) 的第一行和第 j 列后得到的 (n-1) 阶子矩阵的行列式。
-
\((-1)^{1+j} M_{1j}\) 称为 \(a_{1j}\) 的代数伴随式。
这个过程可以递归地进行,直到将 n 阶行列式转化为二阶或三阶行列式,然后进行计算。
例如:
计算矩阵 \(B = \begin{pmatrix} 1 & 2 & 3 \\ 0 & 1 & 4 \\ 2 & 0 & 5 \end{pmatrix}\) 的行列式。
使用降阶公式分解:
\[|B| = (-1)^{1+1} \cdot 1 \cdot \begin{vmatrix} 1 & 4 \\ 0 & 5 \end{vmatrix} + (-1)^{1+2} \cdot 2 \cdot \begin{vmatrix} 0 & 4 \\ 2 & 5 \end{vmatrix} + (-1)^{1+3} \cdot 3 \cdot \begin{vmatrix} 0 & 1 \\ 2 & 0 \end{vmatrix} \]
计算各个二阶行列式:
- \(\begin{vmatrix} 1 & 4 \\ 0 & 5 \end{vmatrix} = (1 \times 5) – (4 \times 0) = 5\)
- \(\begin{vmatrix} 0 & 4 \\ 2 & 5 \end{vmatrix} = (0 \times 5) – (4 \times 2) = -8\)
- \(\begin{vmatrix} 0 & 1 \\ 2 & 0 \end{vmatrix} = (0 \times 0) – (1 \times 2) = -2\)
代入展开式:
\[|B| = 1 \cdot 1 \cdot 5 + (-1) \cdot 2 \cdot (-8) + 1 \cdot 3 \cdot (-2) \]
结果:
\[|B| = 5 + 16 – 6 = 15 \]
行列式特征
行列式虽然是一个标量,但可以有正负、也可以是零,这代表的是空间”体积”的变化是否发生了反转,或者压扁。
以一个基础的单位正方形和它所在的坐标网格为例,这个单位正方形由两个基向量 [1,0] 和 [0,1] 构成,它的面积是 1。接下来,设定一个 2×2 矩阵观察其如何进行空间变换。
A. 行列式 > 0
当行列式为正时,变换会拉伸或压缩空间,但不会改变空间的朝向(没有翻转)。

我们以矩阵 \(A = \begin{pmatrix} 2 & 0 \\ 1 & 1 \end{pmatrix}\) 为例。
- 变换前: 两个基向量是 [1,0] 和 [0,1],它们构成了一个面积为 1 的单位正方形。
- 变换后:
- 第一个基向量 [1,0] 被变换到了 [2,0]。
- 第二个基向量 [0,1] 被变换到了 [1,1]。
- 结果: 整个网格被拉伸了,并且向右倾斜了(剪切)。原来的单位正方形变成了一个面积为 2 的平行四边形(因为行列式 2×1−1×0=2)。
B. 行列式 < 0

当行列式为负时,变换不仅会拉伸或压缩空间,还会对空间进行翻转。
我们以矩阵 \(B = \begin{pmatrix} -1 & 0 \\ 0 & 1 \end{pmatrix}\)为例。
- 变换前: 两个基向量是 [1,0] 和 [0,1]。
- 变换后:
- 第一个基向量 [1,0] 被变换到了 [−1,0]。
- 第二个基向量 [0,1] 被变换到了 [0,1]。
- 结果: 整个网格沿 Y 轴进行了镜像翻转。虽然形状没有改变,但左右方向发生了反转。行列式为 −1(−1×1−0×0=−1),说明面积没有变化,但空间被翻转了。
C. 行列式 = 0
当行列式为零时,变换会将整个空间压扁到一个更低的维度。
我们以矩阵 \(C = \begin{pmatrix} 1 & 1 \\ 2 & 2 \end{pmatrix}\) 为例。
-
变换前: 两个基向量是 [1,0] 和 [0,1]。
-
变换后:
- 第一个基向量 [1,0] 被变换到了 [1,1]。
- 第二个基向量 [0,1] 被变换到了 [2,2]。
-
结果: 两个基向量被压扁到了同一条直线上(斜率为1的直线),原来的整个二维平面被压缩成了一条线。由于面积变成了 0,所以这个变换也是不可逆的。
行列式为0 也是线性相关的代数体现。如果一个矩阵的两列是线性相关的(例如,其中一列是另一列的倍数,向量方向相同),那么它的行列式就必须为 0。
三个定理
-
单位矩阵的行列式为 1: \(det(I)=1\) 这就像为我们的“空间缩放”设定了一个基准。单位矩阵代表了“什么都不做”的变换,所以它的缩放因子自然是 1。
-
交换任意两列,行列式变号: 如果交换矩阵的任意两列,行列式的值会乘以 -1。
例如:$det(\begin{pmatrix} a & b \ c & d \end{pmatrix})=−det(\begin{pmatrix} c & d \ a & b \end{pmatrix}) $
这个规则直接解释了行列式的符号性质。如果变换后空间的朝向发生了改变(比如翻转),那么行列式的符号就会随之改变。
-
对每一列,行列式都具有线性性质: 这个公理可以分解为两个部分:
-
缩放性: 如果将某一列向量乘以一个常数 k,那么整个行列式的值也会乘以 k。
\(det(v1, kv2, v3) = k* det(v1, v2, v3)\)
-
可加性: 如果某一列是两个向量的和,那么行列式可以分解为两个行列式的和。
\(det(v1, v2 + v3) = det(v1, v2) + det(v1, v3)\)
-
三、矩阵的逆

逆矩阵的概念和普通数字的倒数很像。比如,数字 5 的倒数是 1/5,因为 5×(1/5)=1。
对于矩阵来说,如果有一个方阵 A,并且存在一个矩阵 B,使得 A 乘以 B 等于单位矩阵 I,那么 B 就是 A 的逆矩阵,通常记作 \(A^{−1}\)。
用公式表示就是:\(A×A^{−1}=A^{−1}×A=I\)
注意: 只有满足以下条件的矩阵才可能有逆矩阵:
- 它必须是方阵(行数和列数相等)。
- 它的行列式不为零。如果行列式为零,该矩阵是奇异矩阵,它没有逆。
求解方法
求解逆矩阵有多种方法,最直观和常见的是高斯-约旦消元法。
我们知道,通过下面的这几种变换,可以实现矩阵在空间中的基本几何变换(拉伸、压缩、反转等等)
-
将矩阵的任意两行互换位置
-
将某一行乘以一个非零常数
-
将某一行的倍数加到另一行上
这些变换一般称之为初等行变换。
那么,高斯-约旦消元法的核心,是增广矩阵和等效行变换,它的核心逻辑如下:
- 将矩阵 A 和单位矩阵 I 组合成增广矩阵 [A∣I]
- 对矩阵 A 和 I 同时进行多次初等行变换,目标是将矩阵 A 变成单位矩阵。
- 当变换结束时,矩阵 A 变换为单位矩阵,而原来的单位矩阵 I 则变换成了原矩阵的逆\(A^{−1}\)。
计算示例
下面先来一个例子,快速感受下这个过程。
我们以一个 2×2 矩阵为例来说明。
设待求逆的矩阵为: $$ A = \begin{bmatrix} 3 & 1 \ 4 & 2 \end{bmatrix} $$
-
构建增广矩阵 \([A|I]\),将矩阵 \(A\) 和一个相同维度的单位矩阵 \(I\) 拼接在一起。
\[[A | I] = \left[ \begin{array}{cc|cc} 3 & 1 & 1 & 0 \\ 4 & 2 & 0 & 1 \end{array} \right] \]
-
通过行变换将左侧 \(A\) 变为单位矩阵
目标1:使左上角元素为 1。将第一行 (\(R_1\)) 乘以 \(1/3\) (\(R_1 \rightarrow \frac{1}{3}R_1\)):
\[\left[ \begin{array}{cc|cc} 1 & 1/3 & 1/3 & 0 \\ 4 & 2 & 0 & 1 \end{array} \right] \]
目标2:使第一列的其他元素为 0。将第一行乘以 -4,并加到第二行 (\(R_2\)) 上 (\(R_2 \rightarrow R_2 – 4R_1\)):
\[\left[ \begin{array}{cc|cc} 1 & 1/3 & 1/3 & 0 \\ 0 & 2/3 & -4/3 & 1 \end{array} \right] \]
目标3:使对角线上的元素都为 1。将第二行 (\(R_2\)) 乘以 \(3/2\) (\(R_2 \rightarrow \frac{3}{2}R_2\)):
\[\left[ \begin{array}{cc|cc} 1 & 1/3 & 1/3 & 0 \\ 0 & 1 & -2 & 3/2 \end{array} \right] \]
目标4:使第二列的其他元素为 0。} 将第二行乘以 \(-1/3\),并加到第一行 (\(R_1\)) 上 (\(R_1 \rightarrow R_1 – \frac{1}{3}R_2\)):
\[\left[ \begin{array}{cc|cc} 1 & 0 & 1 & -1/2 \\ 0 & 1 & -2 & 3/2 \end{array} \right] \]
-
提取逆矩阵。此时,增广矩阵的左侧已经是单位矩阵 \(I\)。
右侧的矩阵就是 \(A\) 的逆矩阵 \(A^{-1}\)。
\[A^{-1} = \begin{bmatrix} 1 & -1/2 \\ -2 & 3/2 \end{bmatrix} \]
-
验证结果
通过计算 \(A \times A^{-1}\) 来验证结果:
\[\begin{bmatrix} 3 & 1 \\ 4 & 2 \end{bmatrix} \times \begin{bmatrix} 1 & -1/2 \\ -2 & 3/2 \end{bmatrix} \]
\[= \begin{bmatrix} (3\times1 + 1\times(-2)) & (3\times(-1/2) + 1\times(3/2)) \\ (4\times1 + 2\times(-2)) & (4\times(-1/2) + 2\times(3/2)) \end{bmatrix} \]
\[= \begin{bmatrix} (3 – 2) & (-3/2 + 3/2) \\ (4 – 4) & (-2 + 3) \end{bmatrix} = \begin{bmatrix} 1 & 0 \\ 0 & 1 \end{bmatrix} = I \]
计算结果是单位矩阵 \(I\),验证了 \(A^{-1}\) 是正确的。
行变换
这个过程看上去并不复杂,但如果要知道为什么它能成功,还需要了解初等行变换的意义。
初等行变换,相当于对矩阵应用了一次线性变换,也相当于对矩阵左乘了一个初等矩阵(Elementary Matrix),初等矩阵的意思,就是由单位矩阵经过一次初等行变换(或初等列变换)得到的矩阵。
例如,将单位矩阵 I 变化,将第一行和第二行交换
\[I=\begin{bmatrix} 1 & 0 \\ 0 & 1 \end{bmatrix}, I_1 = \begin{bmatrix} 0 & 1 \\ 1 & 0 \end{bmatrix} \]
那么,在计算左乘积时会有这样的特点:
\[I×A=A, \begin{bmatrix} 1 & 0 \\ 0 & 1 \end{bmatrix} × \begin{bmatrix} 3 & 1 \\ 4 & 2 \end{bmatrix} = \begin{bmatrix} 3 & 1 \\ 4 & 2 \end{bmatrix} \]
\[I_1×A=A_1, \begin{bmatrix} 0 & 1 \\ 1 & 0 \end{bmatrix} × \begin{bmatrix} 3 & 1 \\ 4 & 2 \end{bmatrix} = \begin{bmatrix} 4 & 2 \\ 3 & 1 \end{bmatrix} \]
可以看到,$I_1 $是 \(I\) 应用了行交换的结果,而$A_1 $也是 \(A\) 应用了行交换的结果。为什么是左乘积?是因为矩阵乘积的计算,是由左边矩阵的行与右边矩阵的列进行点积计算而来,当右边矩阵不变,左边矩阵的行进行初等变换(交换、缩放等)时,结果行也发生了相同的变换(交换、缩放等)。
所以,如果我们将矩阵求逆的计算理解为拆分变换的过程,就有:
对 矩阵 \(A\) 的多次变换理解为经过多个初等矩阵左乘的过程:
\((E_k⋯E_2E_1)A\)
那么求逆的过程就是:
\((E_k⋯E_2E_1)[A∣I]=[(E_k⋯E_2E_1)A∣(E_k⋯E_2E_1)I]=[I ∣(E_k⋯E_2E_1)I ]\)
这个过程相当于对 A 和 I 都应用同等过程的行变换 Ek..E1
其中,由于 \((E_k⋯E_2E_1)A=I\), 那么说明:
$ A^{-1} = (E_k⋯E_2E_1) = (E_k⋯E_2E_1)I$
因此可以推导出,右边单位矩阵的变换结果就是矩阵的逆。
应用案例
在数学和工程领域,可以结合矩阵求逆的过程来求解线性方程组。

考虑一个如下的线性方程组:
\[\begin{cases} 2x + 3y = 8 \\ x – 2y = -3 \end{cases} \]
我们可以将其表示为矩阵形式 \(A\vec{x} = \vec{b}\):
\[\begin{bmatrix} 2 & 3 \\ 1 & -2 \end{bmatrix} \begin{bmatrix} x \\ y \end{bmatrix} = \begin{bmatrix} 8 \\ -3 \end{bmatrix} \]
其中,\(A = \begin{bmatrix} 2 & 3 \\ 1 & -2 \end{bmatrix}\) 是系数矩阵,\(\vec{x} = \begin{bmatrix} x \\ y \end{bmatrix}\) 是变量向量,\(\vec{b} = \begin{bmatrix} 8 \\ -3 \end{bmatrix}\) 是常数向量。
求解 \(\vec{x}\) 的一个方法是找到 \(A\) 的逆矩阵 \(A^{-1}\),然后计算 \(\vec{x} = A^{-1}\vec{b}\)。
我们将系数矩阵 \(A\) 和一个相同维度的单位矩阵 \(I\) 拼接在一起,形成增广矩阵 \([A | I]\):
\[[A | I] = \left[ \begin{array}{cc|cc} 2 & 3 & 1 & 0 \\ 1 & -2 & 0 & 1 \end{array} \right] \]
接下来通过行变换将左边的 \(A\) 变成单位矩阵 \(I\)。具体变换过程如下:
- 交换第一行和第二行
\[\left[ \begin{array}{cc|cc} 1 & -2 & 0 & 1 \\ 2 & 3 & 1 & 0 \end{array} \right] \]
- 使第一列的其余元素变为 0,将第一行乘以 -2,并加到第二行上
\[\left[ \begin{array}{cc|cc} 1 & -2 & 0 & 1 \\ 0 & 7 & 1 & -2 \end{array} \right] \]
- 使对角线上的元素都变为 1,将第二行乘以 \(1/7\)
\[\left[ \begin{array}{cc|cc} 1 & -2 & 0 & 1 \\ 0 & 1 & 1/7 & -2/7 \end{array} \right] \]
- 使第二列的其余元素变为 0,将第二行乘以 2,并加到第一行上
\[\left[ \begin{array}{cc|cc} 1 & 0 & 2/7 & 3/7 \\ 0 & 1 & 1/7 & -2/7 \end{array} \right] \]
- 结果:获取逆矩阵和方程解
\[A^{-1} = \begin{bmatrix} 2/7 & 3/7 \\ 1/7 & -2/7 \end{bmatrix} \]
接下来,求解方程组 \(\vec{x} = A^{-1}\vec{b}\):
\[\begin{bmatrix} x \\ y \end{bmatrix} = \begin{bmatrix} 2/7 & 3/7 \\ 1/7 & -2/7 \end{bmatrix} \begin{bmatrix} 8 \\ -3 \end{bmatrix} = \begin{bmatrix} (2/7)\times8 + (3/7)\times(-3) \\ (1/7)\times8 + (-2/7)\times(-3) \end{bmatrix} = \begin{bmatrix} (16-9)/7 \\ (8+6)/7 \end{bmatrix} = \begin{bmatrix} 7/7 \\ 14/7 \end{bmatrix} = \begin{bmatrix} 1 \\ 2 \end{bmatrix} \]
因此,方程组的解是 \(x=1, y=2\)。
在经典的最小二乘法线性回归算法中,矩阵求逆是一个重要过程。
四、小试牛刀
下面使用 numpy 来实现本文提到关于矩阵的计算过程,包括:行列式求解和矩阵求逆。
代码示例
import numpy as np
# 二阶矩阵
matrix_2x2_pos = np.array([[4, 2], [3, 1]]) # 行列式 > 0
matrix_2x2_zero = np.array([[1, 2], [2, 4]]) # 行列式 = 0
matrix_2x2_neg = np.array([[1, 2], [3, 4]]) # 行列式 < 0
# 三阶矩阵
matrix_3x3_pos = np.array([[2, 0, 1], [1, 1, 0], [3, 2, 1]]) # 行列式 > 0
matrix_3x3_zero = np.array([[1, 2, 3], [2, 4, 6], [3, 6, 9]]) # 行列式 = 0
matrix_3x3_neg = np.array([[0, 2, 1], [1, 0, 3], [4, 1, 2]]) # 行列式 < 0
# 求行列式
def print_determinant(matrix):
det = np.linalg.det(matrix)
print(f"矩阵:\n{matrix}")
print(f"行列式: {det:.2f}")
if det > 0:
print("行列式为正数\n")
elif det < 0:
print("行列式为负数\n")
else:
print("行列式为零\n")
# 求逆
def inverse_matrix(matrix):
det = np.linalg.det(matrix)
print(f"矩阵:\n{matrix}")
print(f"行列式: {det:.2f}")
if det == 0:
print(" 此矩阵不可逆(行列式为零)\n")
else:
inv = np.linalg.inv(matrix)
print(" 矩阵的逆为:")
print(inv, "\n")
# 输出所有行列式情况
print(" 二阶矩阵行列式")
print_determinant(matrix_2x2_pos)
print_determinant(matrix_2x2_zero)
print_determinant(matrix_2x2_neg)
print(" 三阶矩阵行列式")
print_determinant(matrix_3x3_pos)
print_determinant(matrix_3x3_zero)
print_determinant(matrix_3x3_neg)
# 求逆成功
print(" 求逆成功示例")
inverse_matrix(matrix_3x3_pos)
# 求逆失败
print(" 求逆失败示例")
inverse_matrix(matrix_3x3_zero)
执行上述程序,输出结果如下:
二阶矩阵行列式
矩阵:
[[4 2]
[3 1]]
行列式: -2.00
行列式为负数
矩阵:
[[1 2]
[2 4]]
行列式: 0.00
行列式为零
矩阵:
[[1 2]
[3 4]]
行列式: -2.00
行列式为负数
三阶矩阵行列式
矩阵:
[[2 0 1]
[1 1 0]
[3 2 1]]
行列式: 1.00
行列式为正数
矩阵:
[[1 2 3]
[2 4 6]
[3 6 9]]
行列式: 0.00
行列式为零
矩阵:
[[0 2 1]
[1 0 3]
[4 1 2]]
行列式: 21.00
行列式为正数
求逆成功示例
矩阵:
[[2 0 1]
[1 1 0]
[3 2 1]]
行列式: 1.00
矩阵的逆为:
[[ 1. 2. -1.]
[-1. -1. 1.]
[-1. -4. 2.]]
求逆失败示例
矩阵:
[[1 2 3]
[2 4 6]
[3 6 9]]
行列式: 0.00
此矩阵不可逆(行列式为零)
五、小结
在程序员眼里,矩阵只是一个普通的二维数组,但矩阵的数学意义远大于此,矩阵的几何意义是线性代数的核心思想,这篇文章的目的,是通过一些浅显的讲解来描述两个关键概念:行列式和逆。
行列式有很广泛的数学应用范畴,它的三个基本规则完美地描述了矩阵线性变换的关键特征:基准(det(I)=1)、方向(交换变号) 和缩放(线性性);矩阵的逆则描述了矩阵对空间变换的撤销操作,通过矩阵和矩阵的逆我们可以实现关于空间的任意变换。