Generalizing Linear Classification
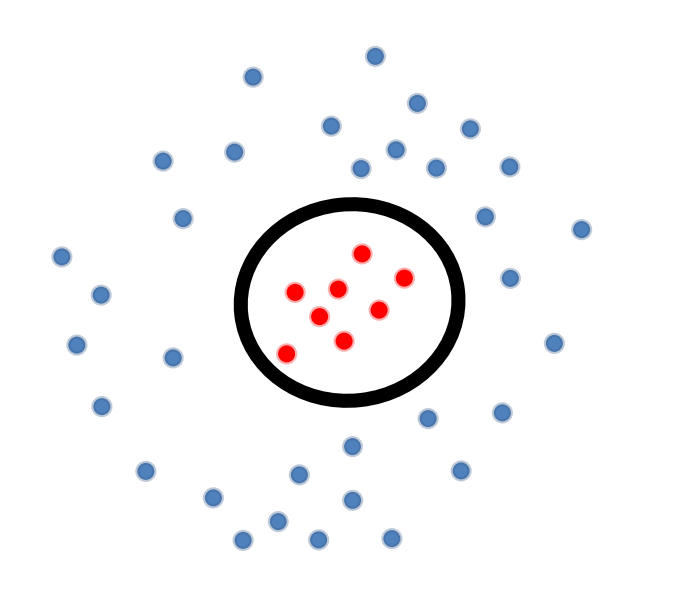
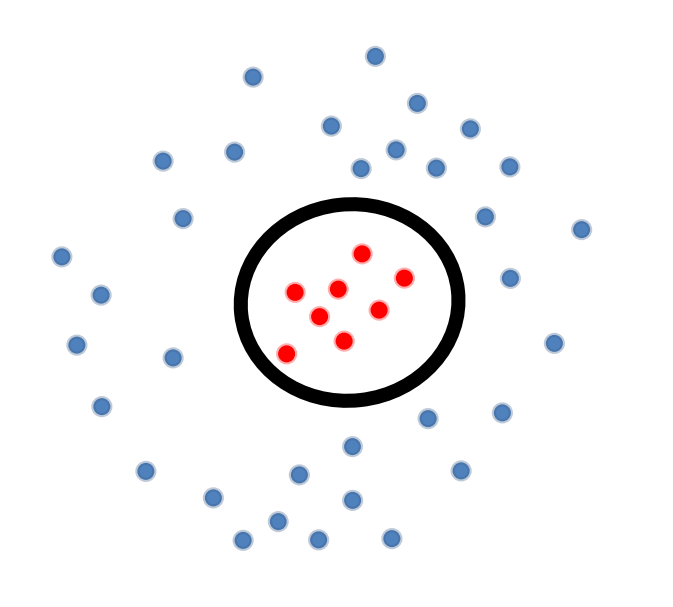
假设我们有如上图的 training data,注意到此时 \(\mathcal{X} \subset \mathbb{R}^{2}\)。
那么 decision boundary \(g\):
\[g(\vec{x}) = w_{1} x_{1}^{2} + w_{2} x_{2}^{2} + w_{0} \]
即,decision boundary 为某种椭圆,例如:半径为 \(r\) 的圆(\(w_{1} = 1, w_{2} = 1, w_{0}=-r^{2}\)),如上图中的黑圈所示。我们会发现,此时 decision boundary not linear in \(\vec{x}\)。
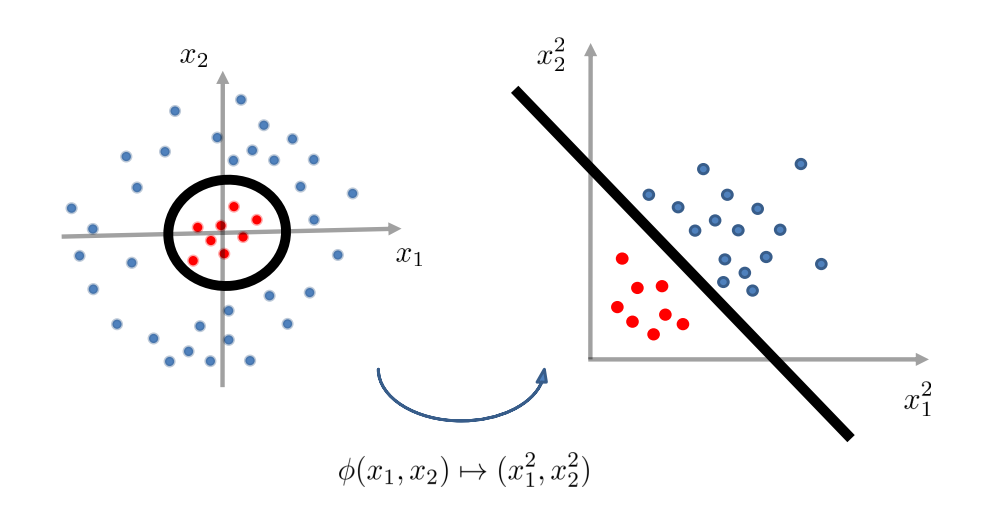
但是,\(g(\vec{x}) = w_{1} x_{1}^{2} + w_{2} x_{2}^{2} + w_{0}\) 在某些空间里却是线性的:
\[\begin{align*} g(\vec{x}) & = w_{1}x_{1}^{2} + w_{2}x_{2}^{2} + w_{0} \qquad \qquad (\text{non-linear in $x_{1}$ and $x_{2}$}) \\ & = w_{1}z_{1} + w_{2}z_{2} + w_{0} \qquad \qquad \; (\text{linear in $z_{1}$ and $z_{2}$}) \end{align*} \]
因此,如果我们对数据进行特征变换(feature transformation):
\[\phi(x_{1}, x_{2}) \longrightarrow (x_{1}^{2}, x_{2}^{2}) \]
那么 \(g\) 在 \(\phi -\) transformed feature space 中变为线性的。
Geometric view on feature transformation
Feature Transformation for Quadratic Boundaries
\(\mathbb{R}^{2}-\) case
generic quadratic boundary 如下:
\[\begin{align*} g(\vec{x}) & = w_{1} x_{1}^{2} + w_{2} x_{2}^{2} + w_{3} x_{1} x_{2} + w_{4} x_{1} + w_{5} x_{2} + w_{0} \\ & = \sum\limits_{p + q \leq 2} w^{p, q} x_{1}^{p} x_{2}^{q} \end{align*} \]
feature transformation 则为:
\[\phi(x_{1}, x_{2}) \longrightarrow (x_{1}^{2}, x_{2}^{2}, x_{1}x_{2}, x_{1}, x_{2}, 1) \]
\(\mathbb{R}^{d}-\) case
generic quadratic boundary 如下:
\[g(\vec{x}) = \sum\limits_{i, j = 1}^{d} \sum\limits_{p + q \leq 2} w_{i, j}^{p, q}x_{i}^{p}x_{j}^{q} \]
feature transformation 则为:
\[\phi(x_{1}, \ldots, x_{d}) \longrightarrow (x_{1}^{2}, x_{2}^{2}, \ldots, x_{d}^{2}, x_{1}x_{2}, \ldots, x_{d-1} x_{d}, x_{1}, x_{2}, \ldots, x_{d}, 1) \]
- 注意,以上的 \(\mathbb{R}^{2}\) 以及下面会提到的 \(\mathbb{R}^{d}\) 指的是数据的维度。
Theorem.
给定 \(n\) 个互不相同的数据点:\(\mathcal{X} = \left\{ \vec{x_{1}}, \vec{x_{2}}, \ldots, \vec{x_{n}} \right\}\),总是存在一个 feature transformation \(\phi\),使得无论的 \(\mathcal{S} = \mathcal{X} \times \mathcal{Y}\) 的 label 如何,它在 transformed space 中总是线性可分的。
Proof.
给定 \(n\) 个数据点,考虑以下映射(映射至 \(\mathbb{R}^{n}\)):
\[\phi(\vec{x_{i}}) \longrightarrow \begin{pmatrix} 0 \\ \vdots \\ 0 \\ 1 \\ 0 \\ \vdots \\ 0 \end{pmatrix} \]
即,映射为一个 one-hot 向量,除第 \(i\) 行处为 \(1\),其它坐标处的值都为 \(0\)。
那么,由 linear weighting \(\vec{w}^{*} = \begin{pmatrix} y_{1} \\ \vdots \\ y_{n} \end{pmatrix}\) 引出的 decision boundary 完美地分割了 input data。
-
解释:
证明的意思是,输入的数据有 \(n\) 个。对于每一个数据点,feature transform 到一个 one-hot vector,只有这条数据在输入的 \(n\) 个数据中排的位置所对应的坐标处取 \(1\),其余全部取 \(0\)。假设输入三个数据:\(\vec{x_{1}}, \vec{x_{2}}, \vec{x_{3}}\),则:
\[\phi(\vec{x_{1}}) = \begin{pmatrix} 1 \\ 0 \\ 0 \end{pmatrix} \qquad \phi(\vec{x_{2}}) = \begin{pmatrix} 0 \\ 1 \\ 0 \end{pmatrix} \qquad \phi(\vec{x_{3}}) = \begin{pmatrix} 0 \\ 0 \\ 1 \end{pmatrix} \]
这样极端的操作有利有弊:
-
优点:
任意的问题都将变为 linear separable。
-
缺点:
-
计算复杂度:
generic kernel transform 的时间复杂度通常是 \(\Omega(n)\),有些常用的 kernel transform 将 input space 映射到 infinite dimensional space 中。
-
模型复杂度:
模型的概括能力(generalization performance)通常随模型复杂度的下降而下降。即,若向简化模型,通常需要以牺牲模型的表现作为代价。
-
-
回顾时间复杂度 \(T(n) = \Omega \big( f(n) \big)\) 的定义:
\[\exists c > 0: ~ \exists n_{0} \in \mathbb{N}^{+}: ~ \forall n \geq n_{0}: ~ T(n) \geq c \cdot f(n) \]
那么 \(\Omega(n)\) 满足:
\[\exists c > 0: ~ \exists n_{0} \in \mathbb{N}^{+}: ~ \forall n \geq n_{0}: ~ T(n) \geq cn \]
也就是说时间复杂度最低也与 \(n\) 呈线性。
The Kernel Trick (to Deal with Computation)
如果直接暴露在 generic kernel space \(\phi(\vec{x_{i}})\) 中进行运算,需要时间复杂度 \(\Omega(n)\)。但是相对而言地,kernel space 中的两个数据点的点积可以被更快地求出,即:
\[\phi(\vec{x_{i}}) \cdot \phi(\vec{x_{j}}) \]
Examples.
-
在 \(\mathbb{R}^{d}\) 空间中的数据的 quadratic kernel transform:
-
Explicit transform:\(O(d^{2})\)
\[\vec{x} \longrightarrow (x_{1}^{2}, \ldots, x_{d}^{2}, \sqrt{2} x_{1} x_{2}, \ldots, \sqrt{2} x_{d-1} x_{d}, \sqrt{2} x_{1}, \ldots, \sqrt{2} x_{d}, 1) \]
-
Dot products:\(O(d)\)
\[(1 + \vec{x_{i}} \cdot \vec{x_{j}})^{2} \]
-
-
径向基函数(Radial Basis Function, i.e., RBF):
-
Explicit transform:infinite dimension!
\[\vec{x} \longrightarrow \Big( \big( \frac{2}{\pi} \big)^{\frac{d}{4}} e^{-||\vec{x} – \alpha||^{2}} \Big)_{\alpha \in \mathbb{R}^{d}} \]
-
Dot products:\(O(d)\)
\[e^{-||\vec{x_{i}} – \vec{x_{j}}||^{2}} \]
-
Kernel 变换的诀窍在于,在实现分类算法的时候只通过 “点积” 的方式接触数据。
Examples.
The Kernel Perceptron(核感知机)
回忆感知机算法,更新权重向量的核心步骤为:
\[\vec{w}^{(t)} \leftarrow \vec{w}^{(t-1)} + y \vec{x} \]
等价地,算法可以写为:
\[\vec{w} = \sum\limits_{k=1}^{n} \alpha_{k} y_{k} \vec{x_{k}} \]
其中,\(\alpha_{k}\) 为在 \(\vec{x_{k}}\) 上发生错误的次数。
因此,分类问题变为:
\[\begin{align*} f(\vec{x}) & = \text{sign}(\vec{w} \cdot \vec{x}) \\ & = \text{sign} \big( \vec{x} \cdot \sum\limits_{k=1}^{n} \alpha_{k} y_{k} \vec{x_{k}} \big) \\ & = \text{sign} \big( \sum\limits_{k=1}^{n} \alpha_{j} y_{k} (\vec{x_{k}} \cdot \vec{x}) \big) \end{align*} \]
其中 \(\vec{x}\) 输入函数 \(f\) 的新数据向量,注意与 \(\vec{x_{k}}\) 区分。
因此,在空间内的分类问题:
\[f(\vec{x}) = \text{sign} \big( \sum\limits_{k=1}^{n} \alpha_{j} y_{k} (\vec{x_{k}} \cdot \vec{x}) \big) \]
若在 tranformed kernel space 中处理,则:
\[f\big( \phi(\vec{x}) \big) = \text{sign} \Big( \sum\limits_{k=1}^{n} \alpha_{k} y_{k} \big( \phi(\vec{x_{k}}) \cdot \phi(\vec{x}) \big) \Big) \]
算法具体如下:
\[\begin{align*} & \text{Initialize}: \vec{\alpha} = \vec{0} \\ & \\ & \text{for } t = 1, 2, 3, \cdots, T: \\ & \\ & \qquad \text{若存在} (\vec{x_{i}}, y) \in \mathcal{S} \text{ s.t. : } \text{sign} \Big( \sum\limits_{k=1}^{n} \alpha_{k} y_{k} \big( \phi(\vec{x_{k}}) \cdot \phi(\vec{x_{i}}) \big) \Big) \neq y_{i}: \\ & \qquad \qquad \alpha_{i} \leftarrow \alpha_{i} + 1 \end{align*} \]
在最后注意到,\(\sum\limits_{k=1}^{n} \alpha_{k} y_{k} \big( \phi(\vec{x_{k}}) \cdot \phi(\vec{x}) \big)\) 中的点积 \(\phi(\vec{x_{k}}) \cdot \phi(\vec{x})\) 是相似度(similarity)的一种衡量方式,故自然能够被其它自定义的相似度衡量方式所替换。
所以,我们可以在任意自定义的非线性空间中,隐性地(implicitly)进行运算,而不需要承担可能的巨大计算量成本。