1.VGG16背景介绍
VGG16是由牛津大学Visual Geometry Group(VGG)在2014年提出的深度卷积神经网络模型,它在当年的ImageNet图像分类竞赛中取得了优异成绩。
VGG16的主要贡献在于展示了网络深度(层数)对模型性能的重要性,通过使用多个小尺寸(3×3)卷积核堆叠来代替大尺寸卷积核,在保持相同感受野的同时减少了参数数量,提高了模型的非线性表达能力。
VGG16之所以著名,是因为它结构简洁规整,全部使用3×3小卷积核和2×2最大池化层,这种设计理念对后续的CNN架构设计产生了深远影响。
虽然现在有更先进的网络架构(如ResNet、EfficientNet等),但VGG16仍然是理解CNN基础架构的经典案例。
2. VGG16架构详解
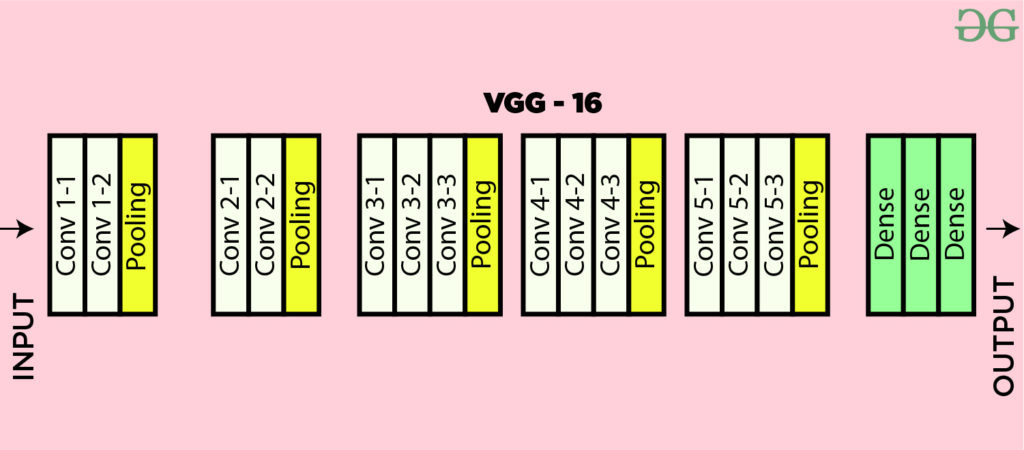
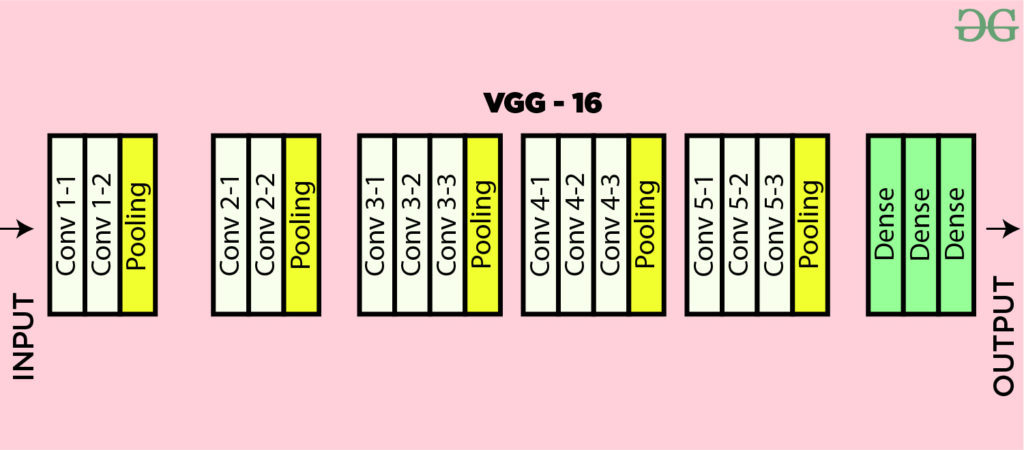
VGG16的架构可以分为两大部分:卷积层部分和全连接层部分。
2.1 卷积层部分
VGG16包含5个卷积块(block),每个块后接一个最大池化层:
- Block1: 2个卷积层(64通道) + 最大池化层
- Block2: 2个卷积层(128通道) + 最大池化层
- Block3: 3个卷积层(256通道) + 最大池化层
- Block4: 3个卷积层(512通道) + 最大池化层
- Block5: 3个卷积层(512通道) + 最大池化层
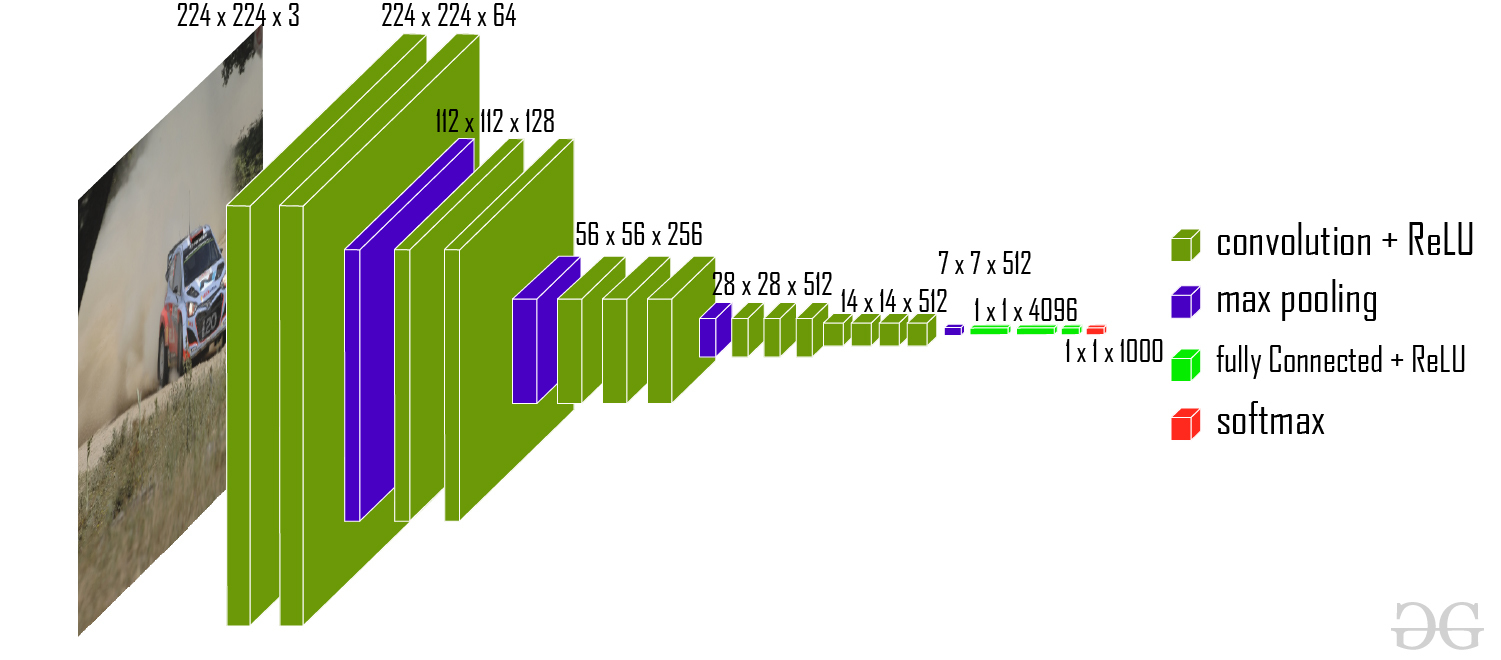
所有卷积层都使用3×3卷积核,padding=1保持空间尺寸不变,池化层使用2×2窗口,stride=2使尺寸减半。
2.2 全连接层部分
卷积部分后接3个全连接层:
- 第一个全连接层:4096个神经元
- 第二个全连接层:4096个神经元
- 第三个全连接层(输出层):1000个神经元(对应ImageNet的1000类)
在本文的代码实现中,我们将其调整为10个输出神经元,以适应FashionMNIST数据集的10分类任务。
3. 每层参数计算详解
理解CNN的参数计算对于掌握模型复杂度至关重要。我们以VGG16为例详细说明:
3.1 卷积层参数计算
卷积层的参数数量计算公式为:
参数数量 = (输入通道数 × 卷积核宽度 × 卷积核高度 + 1) × 输出通道数
以第一个卷积层为例:
- 输入通道:1(灰度图)
- 卷积核:3×3
- 输出通道:64
- 参数数量 = (1×3×3+1)×64 = 640
3.2 全连接层参数计算
全连接层的参数数量计算公式为:
参数数量 = (输入特征数 + 1) × 输出特征数
以第一个全连接层为例:
- 输入特征数:512×7×7=25088(最后一个卷积层输出512通道,7×7空间尺寸)
- 输出特征数:4096
- 参数数量 = (25088+1)×4096 ≈ 102.7M
3.3 VGG16总参数
VGG16的总参数约为1.38亿,其中大部分参数集中在全连接层。这也是为什么后来的网络架构(如ResNet)倾向于使用全局平均池化代替全连接层来减少参数数量。
4. 代码详解
4.1 模型定义(models.py)
import os # 导入os模块,用于操作系统相关功能
import sys # 导入sys模块,用于操作Python运行环境
sys.path.append(os.getcwd()) # 将当前工作目录添加到sys.path,方便模块导入
import torch # 导入PyTorch主库
from torch import nn # 从torch中导入神经网络模块
from torchsummary import summary # 导入模型结构摘要工具
class VGG16(nn.Module): # 定义VGG16模型,继承自nn.Module
def __init__(self, *args, **kwargs): # 构造函数
super().__init__(*args, **kwargs) # 调用父类构造函数
self.block1 = nn.Sequential( # 第一块卷积层
nn.Conv2d(
in_channels=1, out_channels=64, kernel_size=3, padding=1
), # 卷积层,输入通道1,输出通道64
nn.ReLU(), # 激活函数
nn.Conv2d(
in_channels=64, out_channels=64, kernel_size=3, padding=1
), # 卷积层
nn.ReLU(), # 激活函数
nn.MaxPool2d(kernel_size=2, stride=2), # 最大池化层
)
self.block2 = nn.Sequential( # 第二块卷积层
nn.Conv2d(
in_channels=64, out_channels=128, kernel_size=3, padding=1
), # 卷积层
nn.ReLU(), # 激活函数
nn.Conv2d(
in_channels=128, out_channels=128, kernel_size=3, padding=1
), # 卷积层
nn.ReLU(), # 激活函数
nn.MaxPool2d(kernel_size=2, stride=2), # 最大池化层
)
self.block3 = nn.Sequential( # 第三块卷积层
nn.Conv2d(
in_channels=128, out_channels=256, kernel_size=3, padding=1
), # 卷积层
nn.ReLU(), # 激活函数
nn.Conv2d(
in_channels=256, out_channels=256, kernel_size=3, padding=1
), # 卷积层
nn.ReLU(), # 激活函数
nn.Conv2d(
in_channels=256, out_channels=256, kernel_size=3, padding=1
), # 卷积层
nn.ReLU(), # 激活函数
nn.MaxPool2d(kernel_size=2, stride=2), # 最大池化层
)
self.block4 = nn.Sequential( # 第四块卷积层
nn.Conv2d(
in_channels=256, out_channels=512, kernel_size=3, padding=1
), # 卷积层
nn.ReLU(), # 激活函数
nn.Conv2d(
in_channels=512, out_channels=512, kernel_size=3, padding=1
), # 卷积层
nn.ReLU(), # 激活函数
nn.Conv2d(
in_channels=512, out_channels=512, kernel_size=3, padding=1
), # 卷积层
nn.ReLU(), # 激活函数
nn.MaxPool2d(kernel_size=2, stride=2), # 最大池化层
)
self.block5 = nn.Sequential( # 第五块卷积层
nn.Conv2d(
in_channels=512, out_channels=512, kernel_size=3, padding=1
), # 卷积层
nn.ReLU(), # 激活函数
nn.Conv2d(
in_channels=512, out_channels=512, kernel_size=3, padding=1
), # 卷积层
nn.ReLU(), # 激活函数
nn.Conv2d(
in_channels=512, out_channels=512, kernel_size=3, padding=1
), # 卷积层
nn.ReLU(), # 激活函数
nn.MaxPool2d(kernel_size=2, stride=2), # 最大池化层
)
self.block6 = nn.Sequential( # 全连接层部分
nn.Flatten(), # 展平多维输入为一维
nn.Linear(in_features=512 * 7 * 7, out_features=4096), # 全连接层
nn.ReLU(), # 激活函数
nn.Dropout(p=0.5), # Dropout防止过拟合
nn.Linear(in_features=4096, out_features=4096), # 全连接层
nn.ReLU(), # 激活函数
nn.Dropout(p=0.5), # Dropout防止过拟合
nn.Linear(4096, 10), # 输出层,10分类
)
for m in self.modules(): # 遍历所有子模块
print(m) # 打印模块信息
if isinstance(m, nn.Conv2d): # 如果是卷积层
nn.init.kaiming_normal_(
m.weight, mode="fan_out", nonlinearity="relu"
) # 使用Kaiming初始化权重
if m.bias is not None: # 如果有偏置
nn.init.constant_(m.bias, 0) # 偏置初始化为0
if isinstance(m, nn.Linear): # 如果是全连接层
nn.init.normal_(m.weight, 0, 0.01) # 权重正态分布初始化
def forward(self, x): # 前向传播
x = self.block1(x) # 经过第一块
x = self.block2(x) # 经过第二块
x = self.block3(x) # 经过第三块
x = self.block4(x) # 经过第四块
x = self.block5(x) # 经过第五块
x = self.block6(x) # 经过全连接层
return x # 返回输出
if __name__ == "__main__": # 脚本主入口
device = torch.device("cuda" if torch.cuda.is_available() else "cpu") # 选择设备
model = VGG16().to(device=device) # 实例化模型并移动到设备
print(model) # 打印模型结构
summary(model, input_size=(1, 224, 224), device=str(device)) # 打印模型摘要
4.2 训练代码(train.py)
import os
import sys
sys.path.append(os.getcwd()) # 添加上级目录到系统路径中,以便导入自定义模块
import time # 导入time模块,用于计时训练过程
from torchvision.datasets import FashionMNIST # 导入FashionMNIST数据集类
from torchvision import transforms # 导入transforms模块,用于对图像进行预处理
from torch.utils.data import (
DataLoader,
random_split,
) # 导入DataLoader用于批量加载数据,random_split用于划分数据集
import numpy as np # 导入numpy库,常用于数值计算
import matplotlib.pyplot as plt # 导入matplotlib的pyplot模块,用于绘图
import torch # 导入PyTorch主库
from torch import nn, optim # 从torch中导入神经网络模块和优化器模块
import copy # 导入copy模块,用于深拷贝模型参数
import pandas as pd # 导入pandas库,用于数据处理和分析
from VGG16_model.model import VGG16
def train_val_date_load():
# 加载FashionMNIST训练集,并进行必要的预处理
train_dataset = FashionMNIST(
root="./data", # 数据集存储路径
train=True, # 指定加载训练集
download=True, # 如果本地没有数据则自动下载
transform=transforms.Compose(
[
transforms.Resize(size=224),
transforms.ToTensor(),
]
),
)
# 按照8:2的比例将训练集划分为新的训练集和验证集
train_date, val_data = random_split(
train_dataset,
[
int(len(train_dataset) * 0.8), # 80%作为训练集
len(train_dataset) - int(len(train_dataset) * 0.8), # 剩余20%作为验证集
],
)
# 构建训练集的数据加载器,设置批量大小为128,打乱数据,使用8个子进程加载数据
train_loader = DataLoader(
dataset=train_date, batch_size=16, shuffle=True, num_workers=1
)
# 构建验证集的数据加载器,设置批量大小为128,打乱数据,使用8个子进程加载数据
val_loader = DataLoader(
dataset=val_data, batch_size=16, shuffle=True, num_workers=1
)
return train_loader, val_loader # 返回训练集和验证集的数据加载器
def train_model_process(model, train_loader, val_loader, epochs=10):
# 训练模型的主流程,包含训练和验证过程
device = (
"cuda" if torch.cuda.is_available() else "cpu"
) # 判断是否有GPU可用,否则使用CPU
optimizer = optim.Adam(
model.parameters(), lr=0.001
) # 使用Adam优化器,学习率为0.001
criterion = nn.CrossEntropyLoss() # 使用交叉熵损失函数
model.to(device) # 将模型移动到指定设备上
best_model_wts = copy.deepcopy(model.state_dict()) # 保存最佳模型参数的副本
best_acc = 0.0 # 初始化最佳验证准确率
train_loss_all = [] # 用于记录每轮训练损失
val_loss_all = [] # 用于记录每轮验证损失
train_acc_all = [] # 用于记录每轮训练准确率
val_acc_all = [] # 用于记录每轮验证准确率
since = time.time() # 记录训练开始时间
for epoch in range(epochs): # 遍历每一个训练轮次
print(f"Epoch {epoch + 1}/{epochs}") # 打印当前轮次信息
train_loss = 0.0 # 当前轮训练损失总和
train_correct = 0 # 当前轮训练正确样本数
val_loss = 0.0 # 当前轮验证损失总和
val_correct = 0 # 当前轮验证正确样本数
train_num = 0 # 当前轮训练样本总数
val_num = 0 # 当前轮验证样本总数
for step, (images, labels) in enumerate(train_loader): # 遍历训练集的每个批次
images = images.to(device) # 将图片数据移动到设备上
labels = labels.to(device) # 将标签数据移动到设备上
model.train() # 设置模型为训练模式
outputs = model(images) # 前向传播,得到模型输出
pre_lab = torch.argmax(outputs, dim=1) # 获取预测的类别标签
loss = criterion(outputs, labels) # 计算损失值
optimizer.zero_grad() # 梯度清零
loss.backward() # 反向传播计算梯度
optimizer.step() # 更新模型参数
train_loss += loss.item() * images.size(0) # 累加当前批次的损失
train_correct += torch.sum(
pre_lab == labels.data
) # 累加当前批次预测正确的样本数
train_num += labels.size(0) # 累加当前批次的样本数
print(
"Epoch [{}/{}], Step [{}/{}], Loss: {:.4f}, Acc:{:.4f}".format(
epoch + 1,
epochs,
step + 1,
len(train_loader),
loss.item(),
torch.sum(pre_lab == labels.data),
)
)
for step, (images, labels) in enumerate(val_loader): # 遍历验证集的每个批次
images = images.to(device) # 将图片数据移动到设备上
labels = labels.to(device) # 将标签数据移动到设备上
model.eval() # 设置模型为评估模式
with torch.no_grad(): # 关闭梯度计算,提高验证速度,节省显存
outputs = model(images) # 前向传播,得到模型输出
pre_lab = torch.argmax(outputs, dim=1) # 获取预测的类别标签
loss = criterion(outputs, labels) # 计算损失值
val_loss += loss.item() * images.size(0) # 累加当前批次的损失
val_correct += torch.sum(
pre_lab == labels.data
) # 累加当前批次预测正确的样本数
val_num += labels.size(0) # 累加当前批次的样本数
print(
"Epoch [{/{}], Step [{}/{}], Val Loss: {:.4f}, Acc:{:.4f}".format(
epoch + 1,
epochs,
step + 1,
len(val_loader),
loss.item(),
torch.sum(pre_lab == labels.data),
)
)
train_loss_all.append(train_loss / train_num) # 记录当前轮的平均训练损失
val_loss_all.append(val_loss / val_num) # 记录当前轮的平均验证损失
train_acc = train_correct.double() / train_num # 计算当前轮的训练准确率
val_acc = val_correct.double() / val_num # 计算当前轮的验证准确率
train_acc_all.append(train_acc.item()) # 记录当前轮的训练准确率
val_acc_all.append(val_acc.item()) # 记录当前轮的验证准确率
print(
f"Train Loss: {train_loss / train_num:.4f}, Train Acc: {train_acc:.4f}, "
f"Val Loss: {val_loss / val_num:.4f}, Val Acc: {val_acc:.4f}"
) # 打印当前轮的损失和准确率
if val_acc_all[-1] > best_acc: # 如果当前验证准确率优于历史最佳
best_acc = val_acc_all[-1] # 更新最佳准确率
best_model_wts = copy.deepcopy(model.state_dict()) # 保存当前最佳模型参数
# model.load_state_dict(best_model_wts) # 可选:恢复最佳模型参数
time_elapsed = time.time() - since # 计算训练总耗时
print(
f"Training complete in {time_elapsed // 60:.0f}m {time_elapsed % 60:.0f}s\n"
f"Best val Acc: {best_acc:.4f}"
) # 打印训练完成信息和最佳验证准确率
torch.save(
model.state_dict(), "./models/vgg16_net_best_model.pth"
) # 保存最终模型参数到文件
train_process = pd.DataFrame(
data={
"epoch": range(1, epochs + 1), # 轮次编号
"train_loss_all": train_loss_all, # 每轮训练损失
"val_loss_all": val_loss_all, # 每轮验证损失
"train_acc_all": train_acc_all, # 每轮训练准确率
"val_acc_all": val_acc_all, # 每轮验证准确率
}
)
return train_process # 返回训练过程的详细数据
def matplot_acc_loss(train_process):
# 绘制训练和验证的损失及准确率曲线
plt.figure(figsize=(12, 5)) # 创建一个宽12高5的画布
plt.subplot(1, 2, 1) # 创建1行2列的子图,激活第1个
plt.plot(
train_process["epoch"], train_process["train_loss_all"], label="Train Loss"
) # 绘制训练损失曲线
plt.plot(
train_process["epoch"], train_process["val_loss_all"], label="Val Loss"
) # 绘制验证损失曲线
plt.xlabel("Epoch") # 设置x轴标签为Epoch
plt.ylabel("Loss") # 设置y轴标签为Loss
plt.title("Loss vs Epoch") # 设置子图标题
plt.legend() # 显示图例
plt.subplot(1, 2, 2) # 激活第2个子图
plt.plot(
train_process["epoch"], train_process["train_acc_all"], label="Train Acc"
) # 绘制训练准确率曲线
plt.plot(
train_process["epoch"], train_process["val_acc_all"], label="Val Acc"
) # 绘制验证准确率曲线
plt.xlabel("Epoch") # 设置x轴标签为Epoch
plt.ylabel("Accuracy") # 设置y轴标签为Accuracy
plt.title("Accuracy vs Epoch") # 设置子图标题
plt.legend() # 显示图例
plt.tight_layout() # 自动调整子图间距
plt.ion() # 关闭交互模式,防止图像自动关闭
plt.show() # 显示所有图像
plt.savefig("./models/vgg16_net_output.png")
if __name__ == "__main__": # 如果当前脚本作为主程序运行
traindatam, valdata = train_val_date_load() # 加载训练集和验证集
result = train_model_process(VGG16(), traindatam, valdata, 10)
matplot_acc_loss(result) # 绘制训练和验证的损失及准确率曲线
4.3 测试代码(test.py)
import os # 导入os模块,用于处理文件和目录
import sys
sys.path.append(os.getcwd()) # 添加上级目录到系统路径,以便导入其他模块
import torch
from torch.utils.data import (
DataLoader,
random_split,
)
from torchvision import datasets, transforms
from torchvision.datasets import FashionMNIST
from VGG16_model.model import VGG16 # 导入自定义的模型
def test_data_load():
test_dataset = FashionMNIST(
root="./data",
train=False,
download=True,
transform=transforms.Compose(
[
transforms.Resize(size=224),
transforms.ToTensor(),
]
),
)
test_loader = DataLoader(
dataset=test_dataset, batch_size=16, shuffle=True, num_workers=1
)
return test_loader
print(test_data_load())
def test_model_process(model, test_loader):
device = "cuda" if torch.cuda.is_available() else "cpu"
model.to(device)
model.eval() # 设置模型为评估模式
correct = 0
total = 0
with torch.no_grad(): # 在测试时不需要计算梯度
for images, labels in test_loader:
images, labels = images.to(device), labels.to(device)
outputs = model(images) # 前向传播
_, predicted = torch.max(outputs, 1) # 获取预测结果
total += labels.size(0) # 累计总样本数
correct += torch.sum(predicted == labels.data) # 累计正确预测的样本数
accuracy = correct / total * 100 # 计算准确率
print(f"Test Accuracy: {accuracy:.2f}%") # 打印测试准确率
if __name__ == "__main__":
test_loader = test_data_load() # 加载测试数据
model = VGG16() # 实例化模型
model.load_state_dict(
torch.load("./models/vgg16_net_best_model.pth")
) # 加载模型参数
test_model_process(model, test_loader) # 进行模型测试
5. 总结
VGG16作为深度学习发展史上的里程碑式模型,其设计理念至今仍有重要参考价值:
-
小卷积核优势:通过堆叠多个3×3小卷积核代替大卷积核,在保持相同感受野的同时减少了参数数量,增加了非线性表达能力。
-
深度重要性:VGG16证明了增加网络深度可以显著提高模型性能,为后续更深网络(如ResNet)的研究奠定了基础。
-
结构规整:VGG16结构简洁规整,便于理解和实现,是学习CNN架构的优秀范例。
-
初始化技巧:代码中展示了Kaiming初始化等现代神经网络训练技巧,这些对于模型收敛至关重要。
-
完整流程:本文提供了从数据加载、模型定义、训练到测试的完整流程,可以作为实际项目的参考模板。
虽然VGG16现在可能不是性能最优的选择,但它仍然是理解CNN基础架构的最佳起点。通过本博客的学习,读者应该能够掌握VGG16的核心思想,并能够将其应用到自己的图像分类任务中。